회로도
Jetson NX
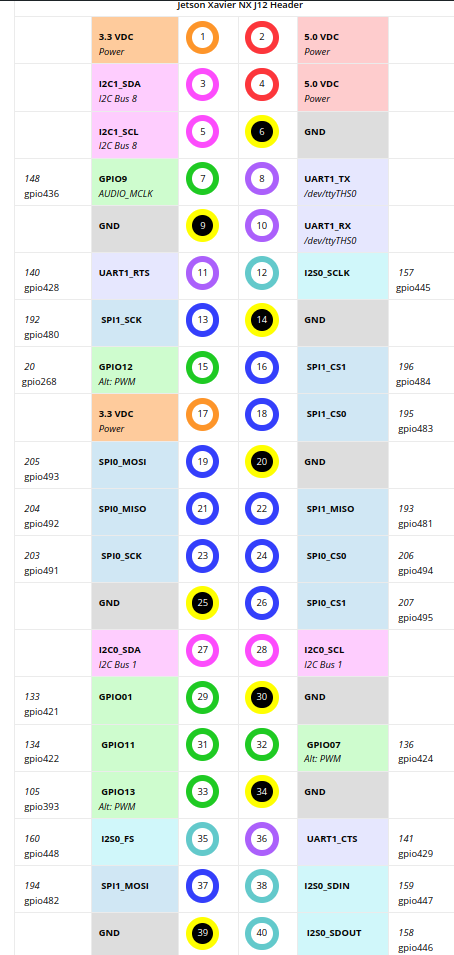 출처: https://jetsonhacks.com/nvidia-jetson-xavier-nx-gpio-header-pinout
출처: https://jetsonhacks.com/nvidia-jetson-xavier-nx-gpio-header-pinout
→ 6,8,10 활용하여 UART1에 해당하는 ttyTHS0과 연결(RTS,CTS 연결불필요)
이후, port 충돌을 막기 위하여 아래 command를 terminal 창에 기입한다.(Thanks to 박찬준 인턴님)
sudo systemctl disable nvgetty.service
Pixhawk
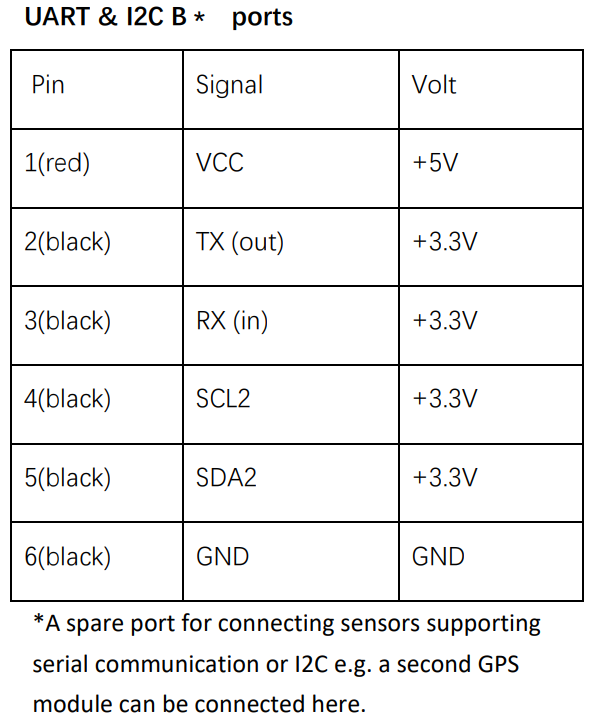 출처: http://www.holybro.com/manual/Pixhawk4Mini_Pinouts.pdf
출처: http://www.holybro.com/manual/Pixhawk4Mini_Pinouts.pdf
→ SCL/SDA는 연결하지 않아도 괜찮음.(I2C)
소프트웨어 setup
- PX4 parameter (참고자료)
- MAV_1_CONFIG: “104: TELEM/SERIAL 4”
TELEM4(UART+I2C)에 해당하는 설정- 최우선 설정 parameter→ reboot 해야지만 이와 연관된 설정 값을 변경할 수 있음.
- MAV_1_FLOW_CTRL:
“2: Auto-detected”“0: Force off”- RTS/CTS를 활용할지에 대한 parameter
- 동기화된 Serial 통신인 USART port가 있다면 어차피 RTS/CTS 라인이 필요하지 않고, UART인 경우 사용할 수도 있음.
- Pixhawk 6C, 6C mini와 Jetson Orin NX를 활용하는 경우 Auto detected로는 작동하지 않음을 확인함.
- 신경쓰지 않고 싶다면 Pixhawk 6C의 경우 TELEM3 port 가 USART 이므로 이를 활용하면 되지만 Pixhawk 6C mini는 debug port 에만 USART 기능이 있는데 이는 onboard 연결에 활용할 수 없음.
- MAV_1_MODE: “2: Onboard”
-
SER_TEL4_BAUD: “921600: 921600 8N1”
→ 기본은 57600 8N1이고 그대로 써도 되지만 mavros 에서 921600을 쓰고 싶다면 변경해야함.
- MAV_1_CONFIG: “104: TELEM/SERIAL 4”
- MAVROS
- fcu_url 값의 device 정보를 ttyACM0에서 ttyTHS0로 변경해야함.
- fcu_url의 baudrate는 위 PX4 parameter (SER_TEL4_BAUD)의 설정값에 맞추어 설정
※ Pixhawk data Hz 설정
-
Pixhawk 4 미니- PX4 오토파일럿 사용자 설명서

-
위 표에 따라서 pixhawk sd card에 저장된 extras.txt 파일을 변경시 Pixhawk의 usb 포트인 /dev/ttyACM0 대신 UART통신 포트인 /dev/ttyS3으로 변경해야함.
[예시] mavlink stream -d /dev/ttyS3 -s HIGHRES_IMU -r 200
Comments